社会基盤施設を対象とし、MMS(Moble Mapping System)、UAV(Unmanned Aerial Vehicle)やTLS(Terrain Laser Scanner)等を用いて取得した現況の点群データを検査対象の部位ごとに分割し、低密度な箇所や欠損を補完した上で最も点群データにフィッティングするパラメトリックモデルの寸法値を自動で算出するシステムの開発に取り組んでいます。
既存研究の課題
既存の点群データから3次元モデルを生成する既存手法として、近似面を推定する手法や面と面の境界を推定する手法が提案されています。近似面を推定する手法は、RANSAC法を用いて点群データから近似面の推定を繰り返すことで3次元モデルを生成できます。また、面と面の境界を推定する手法は、構造物のエッジとなる箇所を推定し、エッジに囲まれる領域を面と推定することで3次元モデルを生成できます。これらの既存手法により、対象構造物の形状によらず点群データ全体を3次元モデル化できます。
現況の構造物を計測した点群データからCIMで求められる3次元モデルを生成する際に、既存手法をそのまま適用した場合、下図に示す課題が想定されます。
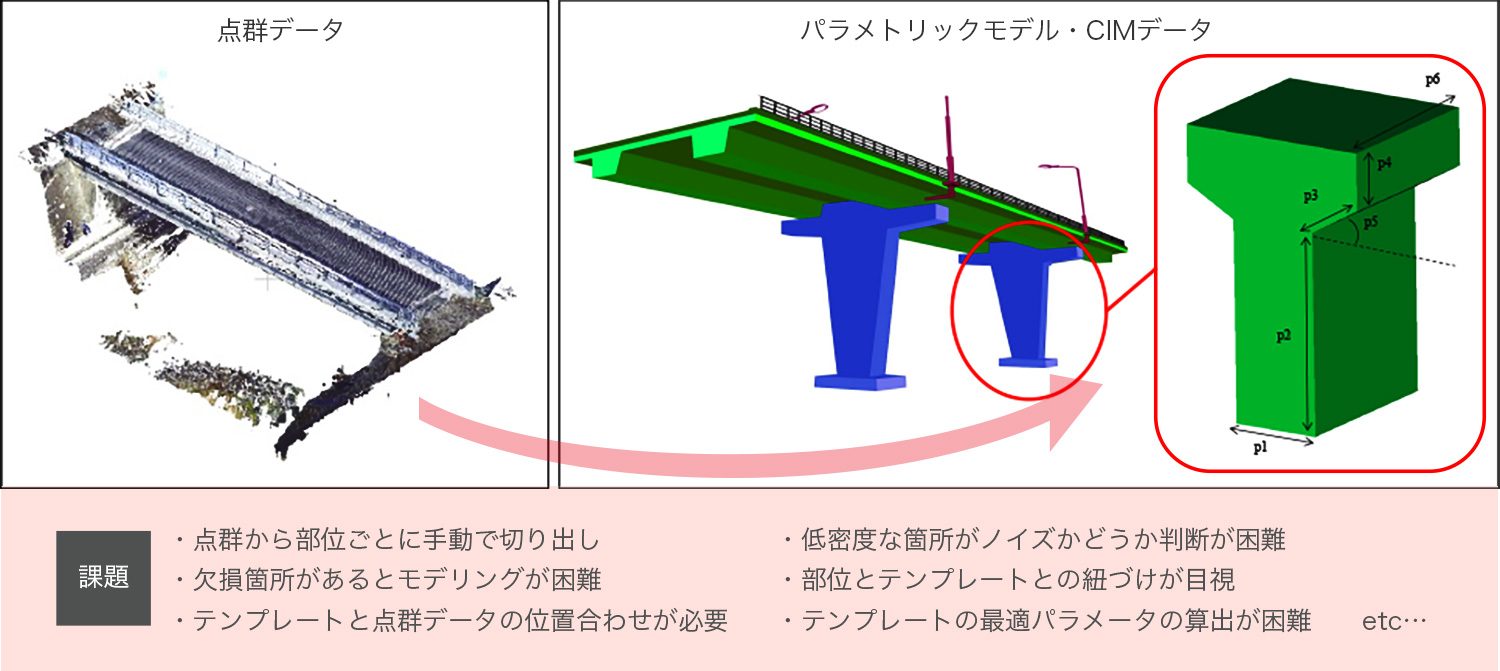
点群データから3次元モデルを生成する既存手法の課題
①どの領域の点群データがどの部位に当たるのかを判断することが困難。
例えば、橋脚、対傾構や横桁等のように1つの橋梁でも多数存在する部位がある場合、既存手法を適用するためには、それらを1つ1つの部位ごとに手動で分割する必要があります。しかし、1つの橋梁につき、これらの部位は数十以上にものぼり、そのため、これらを目視で判断し、手動で分割することは膨大な時間がかかり、現実的な作業量ではありません。
②点群の密度が低い場合や、構造物の一部を計測できていない場合、モデリングが困難。
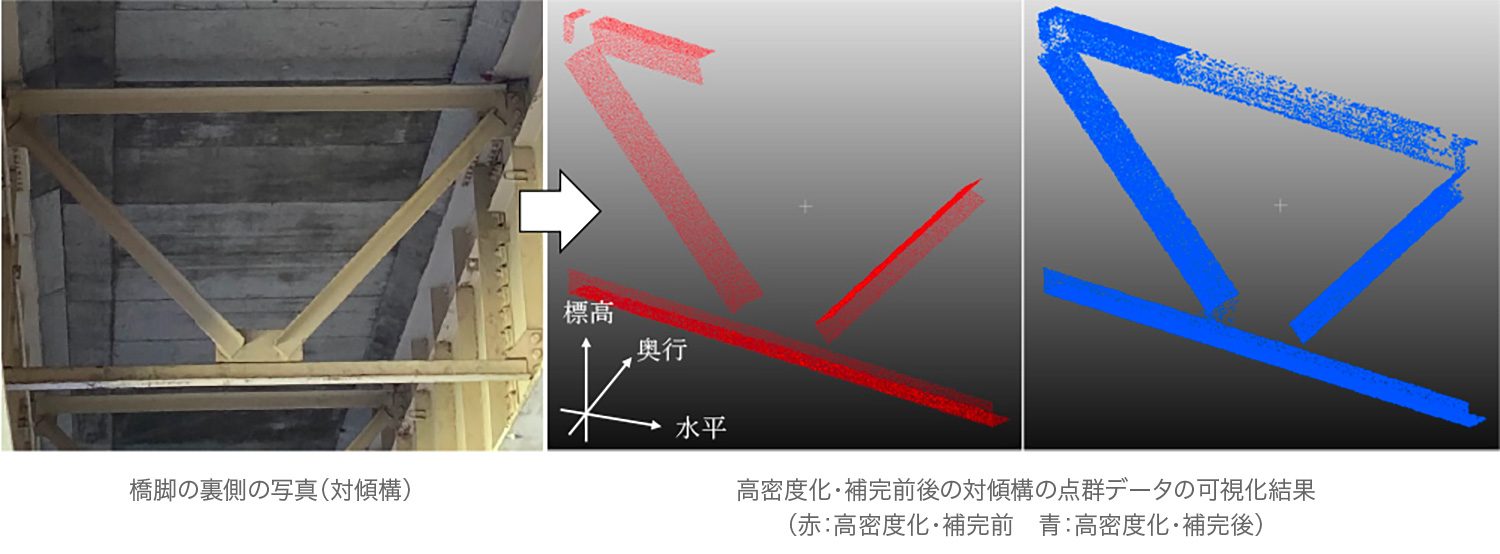
社会基盤施設の現況を計測する場合、常に車が行き交うような高架橋の下や橋脚の下は、MMSやUAVを使って計測します。しかし、移動しながら計測できる範囲は限られており、構造が入り組んでいて他の部位によるオクルージョンが発生しやすい対傾構や横桁のような部位では、点群データを十分な密度で計測できない場合や欠損が発生する場合があります。これらの点群データに既存手法をそのまま適用した場合、本来の形状と異なる3次元モデルが生成される課題があります。
③モデルを点群データにフィッティングさせるパラメータの最適値の算出が困難。
弊社では2019年8月に一般財団法人日本建設情報総合センター(JACIC)の社会基盤情報標準化委員会より採択を受け、維持管理を基軸とした橋梁のパラメトリックモデリングの標準化検討小委員会を設立しました。この小委員会では、既設橋梁をMMS、TLSやUAV等で計測した点群データからパラメトリックモデリングによって3次元モデルを構築し、IFC(Industry Foundation Classes)やCIMモデル等の関連仕様との整合を図りつつ、プロダクトモデルの標準規格であるISO10303(STEP:Standard for the Exchange of Product Model Data)に準拠して表現するための指針を検討しました。本パラメトリックモデルは、上図の右に示すような寸法値や角度等の複数のパラメータを組み合わせて構造物の概形を定義したものです。本モデルを採用することで、寸法値等のパラメータを適宜変更して、既設構造物の3次元モデルをより精確に生成できます。そのため、既設構造物の部位ごとの点群データからこれらのパラメトリックモデルをテンプレートとして最適な寸法を算出することが求められます。しかし、寸法値の組み合わせは多岐に渡るため、最も合致するパラメータを手動で算出することは困難です。
本システムの特長
下図は点群データからCIMデータの課題解決に向けた提案手法の流れです。
A.部位認識機能、B.高密度化・補完機能、C.3次元モデル生成機能により構成され、既存手法では実現が困難だった実現場で計測された点群データからCIMで活用可能な3次元モデルを作成できます。

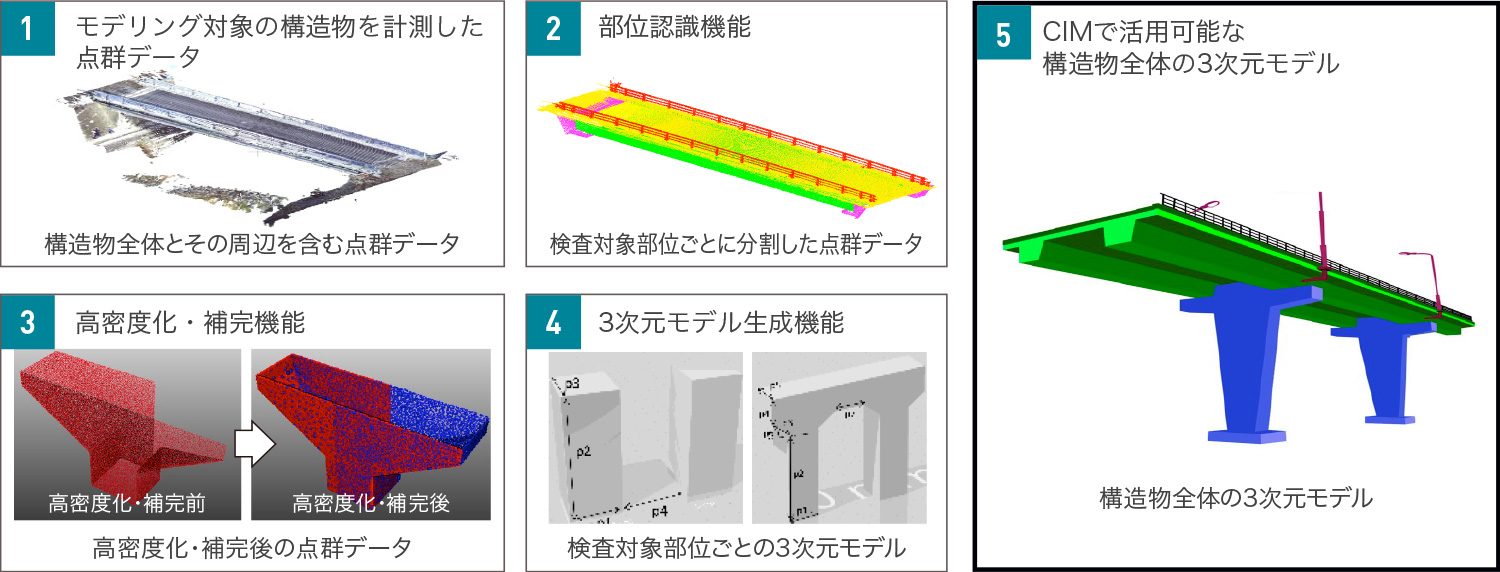
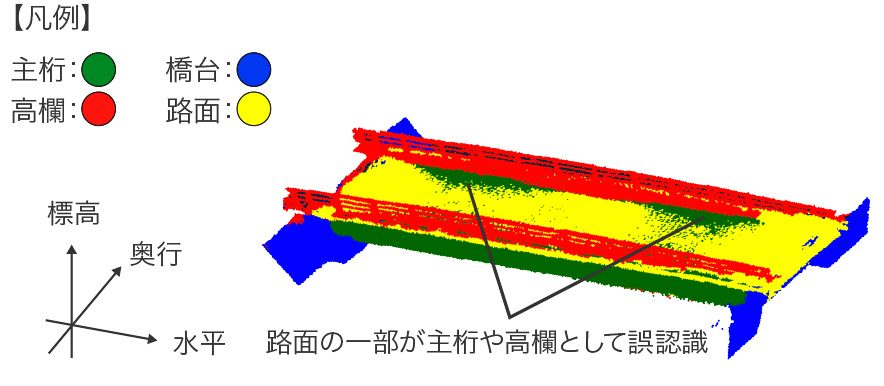
A.部位認識機能
AI技術を用いて構造物とその周辺を含む点群データから、検査対象の部位ごとの点群データを認識します。これらの手法を用いて、事前に右図に示すような部位ごとの点群データを学習することで検査対象の部位ごとの点群データを認識することができます。本機能により「どの領域の点群データがどの部位に当たるのかを判断することが困難な課題」の解消が期待できます。
B.高密度化・補完機能
部位ごとの点群データを高密度化しつつ、欠損がある箇所を補完します。点群データを高密度化し、部位ごとのパラメトリックモデルの面上にランダムで点を生成することで疑似的な点群データを作成します。さらに人為的に様々なパターンの欠損を発生させ、欠損前後の点群データを学習させることで、部位ごとの点群データを高密度化しつつ、補完します。本機能により、2つ目の「点群の密度が低い場合や構造物の一部を計測できていない場合モデリングが困難な課題」の解消が期待できます。
C.3次元モデル生成機能
欠損のない高密度な部位ごとの点群データを基に遺伝的アルゴリズム(Genetic Algorithms 以下、GA)を用い、パラメトリックモデルのパラメータの最適値を探索します。GAは生物が交差、突然変異、淘汰を繰り返して環境に適応する進化の過程を模したアルゴリズムです。まず、点群データとGAに適用するパラメトリックモデルの中心位置が一致するように移動させます。そして、GAを用いてモデルの寸法値と微小な位置合わせのパラメータの最適値を探索します。本機能により「モデルを点群データにフィッティングさせるパラメータの最適値の算出が困難な課題」の解消が期待できます。
今後は、CIMでの活用だけでなく、構造物の維持管理の効率化および高度化が期待でき、建設分野での活用だけに限らず、3次元モデルによる検査によって高度化できる他の分野への展開も期待できます。